
Veículos autônomos: Impactos para a sociedade
Os veículos autônomos representam o futuro da mobilidade, com tecnologias avançadas de hardware e software que permitem sua condução sem intervenção humana. O ADAS é um precursor dessa tecnologia, mostrando uma evolução gradual até a autonomia completa. A SAE definiu seis níveis de automação, sendo o nível 0 de menor autonomia, com apenas alguns avisos ao condutor, e o nível 5 totalmente autônomo. Os veículos de passeio atuais, como os da Tesla, são considerados apenas nível 2. Tecnologias avançadas são fundamentais para o desenvolvimento, como IA e 5G. Os impactos sociais dos veículos autônomos incluem maior segurança viária, menos congestionamentos, menor tempo de deslocamento, benefícios ambientais e mais eficiência no compartilhamento de veículos. Porém, mudanças legislativas são necessárias para definir responsabilidades em acidentes, entre outras questões legais, e, principalmente, no Brasil, o investimento em PD&I.
Douglas Bellomo Cavalcante; Matheus Jacon Pereira; Leandro Avanço; e Fabrício Gonçalves Torres, pesquisadores do IPT – Instituto de Pesquisas Tecnológicas do Estado de São Paulo
Os veículos autônomos são o futuro da mobilidade e estão no radar da Indústria e da Academia. São veículos que dispõe de tecnologias de hardware e software que permitem sua condução autônoma, de maneira a, idealmente, não precisar de intervenção humana. O ADAS – Advanced Driver-Assistance System compõe um conjunto de tecnologias que são suas precursoras, demonstrando que há uma evolução gradativa até que os veículos totalmente autônomos sejam realidade. Dessa forma, a SAE – Sociedade de Engenheiros Automotivos estabeleceu seis níveis de automação para direção, sendo que o nível 0 (zero) dispõe apenas de avisos para auxílio à condução e o nível 5 (cinco) não depende de intervenção humana, conforme apresentado na tabela abaixo.
Tab. I – Níveis de autonomia veicular – Classificação SAE
| Nível | Descrição | Funções do Motorista | Exemplos |
| 0 | Nenhuma autonomia, segurança ativa | Controle total do motorista | ABS, avisos e alertas |
| 1 | Autonomia limitada, segurança ativa e algumas funções autônomas | Nível de controle altíssimo pelo motorista | Centralização na faixa ou controle de velocidade adaptativo |
| 2 | Autonomia limitada, segurança ativa mais conveniência | Maior parte do controle pelo motorista. Sistema assume em certas condições | Centralização nas faixas, controle de velocidade adaptativo, estacionamento autônomo, funções simultâneas |
| 3 | Autonomia condicional | Motorista pode desabilitar a automação e habilitá-la em condições específicas | Autonomia acionada em determinadas condições: tráfego intenso, autoestrada, dentre outros |
| 4 | Alto nível de autonomia | Motorista não é necessário em determinadas condições | Autonomia condicional em locais autorizados |
| 5 | Autonomia total | Motorista não é necessário | Total automação, sem necessidade de motorista |
Fonte: Norma SAE J3016
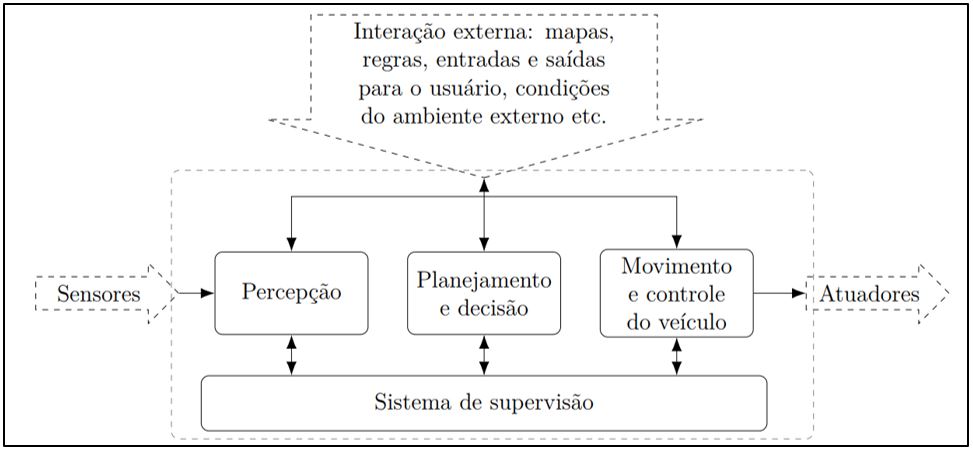
Alguns veículos atuais, como os da Tesla, ainda que pareçam autônomos são considerados nível 2 na classificação SAE. Quanto à arquitetura, os veículos autônomos podem ser analisados sob duas ópticas: do ponto de vista técnico, duas camadas (hardware e software) são responsáveis pela realização da automação, sendo que na primeira camada estão o sensoriamento, a atuação, a comunicação e o processamento, e na segunda camada, o sistema operacional de tempo real e os algoritmos, em geral, de IA – inteligência artificial; e do ponto de vista funcional, a camada de percepção é responsável por perceber o ambiente ao redor do veículo, a de planejamento e decisão por definir o melhor caminho (local ou global) e a camada de controle, por estabelecer as diretrizes dos atuadores (acelerador, freio, marcha e direção).
Os sensores (camada de percepção) são dispositivos fundamentais dos veículos autônomos, trabalhando de maneira conjunta para compensar as limitações físicas inerentes em cada um. A camada de planejamento é responsável por definir a rota global do veículo, bem como as ações locais para desvio de obstáculos e ajuste de velocidade. A camada de controle utiliza de técnicas como PID – Proportional–Integral–Derivative Controller e lógica fuzzy para definir os valores de atuação para os atuadores. A figura abaixo apresenta a arquitetura em camadas dos veículos autônomos.
Outros conceitos também estão sendo estudados, como uso de IA de ponta a ponta, além de serem desenvolvidos hardwares dedicados para veículos autônomos. A tecnologia 5G será fundamental para essa evolução tecnológica por meio da comunicação V2X, devido à sua baixa latência, alta confiabilidade e alta mobilidade. Nessa linha, alguns casos já estão sendo estudados e aplicados em Londres, Tailândia e Península Ibérica, incluindo estudos de coordenação de tráfego e atualização de mapas em alta definição.
Toda essa revolução tecnológica dependerá de alterações na legislação, principalmente voltadas à definição de responsabilidades em casos de acidentes, sendo que a França está bastante adiantada no tema e o Brasil bastante atrasado. Quanto aos impactos para a sociedade, os veículos autônomos trarão aumento da segurança viária, redução de congestionamentos, redução do tempo de deslocamento, redução de impactos ambientais, melhoria de qualidade de vida dos ocupantes e tornarão o compartilhamento de veículos mais eficiente e confortável.
Embora no Brasil, os projetos de PD&I – pesquisa, desenvolvimento e inovação em veículos autônomos ainda sejam incipientes, há exemplos de aplicações reais que estão focadas em ambientes fechados controlados, tanto na agricultura quanto na indústria, e já existe veículos de níveis SAE 2 e SAE 4 operando. Há exemplos também de institutos de pesquisa que buscam desenvolver a tecnologia alinhada às necessidades do país, tal como ocorre na Unidade de Tecnologias Digitais do IPT, que busca realizar projetos e desenvolvimento de software em plataformas variadas, inclusive dispositivos móveis, com o foco em qualidade, desempenho, segurança, interoperabilidade, facilidade de manutenção, usabilidade e no atendimento às necessidades do usuário. Seus produtos possuem integração com recursos de IoT – Internet das coisas, big data e inteligência artificial. A área também realiza pesquisas, desenvolvimento e testes de soluções inteligentes no domínio dos transportes e logística, que integrem veículos, infraestrutura, usuários, pedestres, centros de gestão, meios de comunicação e sensores.
O desenvolvimento e a disseminação no Brasil de tecnologias que tornem os veículos cada vez mais inteligentes devem estar no escopo de parcerias público-privadas e de medidas estratégicas que possam alavancar novas tecnologias aplicadas aos veículos autônomos e conectados, tornando o transporte cada vez mais inteligente.
Douglas Bellomo Cavalcante é mestre em Automação e Controle de Processos pelo Instituto Federal de Educação, Ciência e Tecnologia de São Paulo, Especialista em Automação Industrial pela Faculdade SENAI de Tecnologia, graduado em Engenharia Mecatrônica pela Faculdades Integradas de São Paulo – FISP e em Tecnologia em Mecânica de Precisão pela Faculdade de Tecnologia de São Paulo – FATEC-SP. Possui 15 anos de experiência na área de tecnologia, com focos em diagnóstico de problemas, desenvolvimento de software, análise de sistemas, IoT e Indústria 4.0. Atualmente é responsável pela Seção de Engenharia de Software e Transportes Inteligentes do IPT.
dcavalcante@ipt.br
Matheus Jacon Pereira é mestre em Engenharia da Computação – Redes de Computadores pelo IPT e graduado em Engenharia Elétrica pela Universidade Estadual Paulista Júlio de Mesquita Filho, UNESP. Possui publicações acadêmicas nas áreas de RFID, Internet das Coisas, Sistemas Inteligentes de Transporte (ITS), Rede de Computadores e automação. Atuou como professor em cursos de Engenharia de Computação, Engenharia Elétrica e Sistemas de Informação e atualmente é professor no curso de pós-graduação (MTA) em Cibersegurança ministrando disciplinas de Engenharia Reversa e Análise de Malware. Atuou na área de PD em companhias do setor de telecomunicações e é Pesquisador do IPT, trabalhando com pesquisa e desenvolvimento nas áreas de RFID, ITS, Internet das Coisas, Redes de Computadores, Governança e Segurança da Informação. Além de liderar projetos de desenvolvimento para Sistemas operacionais Linux e Android, incluindo requisitos de cibersegurança.
mjacon@ipt.br
Leandro Avanço é mestre em Engenharia da Computação – Redes de Computadores pelo IPT e possui graduação em Engenharia Elétrica – Telecomunicações pela FEI. Possui publicações nas áreas de Cibersegurança, RFID e Internet das Coisas. Atuou com suporte e implantação nas áreas de redes de dados, redes de voz, configuração e administração de servidores em geral, segurança da informação e proteção de perímetro. Atuou como professor em cursos de Engenharia de Computação e Sistemas de Informação e atualmente é professor no curso de pós-graduação em Cibersegurança no IPT, onde, também é Gerente Técnico de P&D da seção de Internet das Coisas e Sistemas Embarcados, trabalhando com pesquisa e desenvolvimento nas áreas de RFID, ITS, Internet das Coisas, Internet, IPv6, 5G e Cibersegurança.
lavanco@ipt.br
Fabrício Gonçalves Torres é físico, mestre em Processos Industriais e responsável pela área de Alta Frequência e Telecomunicações do Laboratório de Metrologia Elétrica do IPT. Possui mais de 17 anos de experiência em metrologia e realiza auditorias, consultorias e treinamentos na área de qualidade, metrologia e instrumentação.
fabrigt@ipt.br
www.linkedin.com/in/fabriciogt
Referências
VELASCO-HERNANDEZ, G. et al. Autonomous Driving Architectures, Perception and Data Fusion: A Review. In: 2020 IEEE 16th International Conference on Intelligent Computer Communication and Processing (ICCP). Cluj-Napoca, Romania: IEEE, 2020. p. 315–321. ISBN 978-1-72819-080-8. Disponível em: <https://ieeexplore.ieee.org/document/9266268/>.







